


我校获第二十三届全国大学生机器人大赛全国一等奖
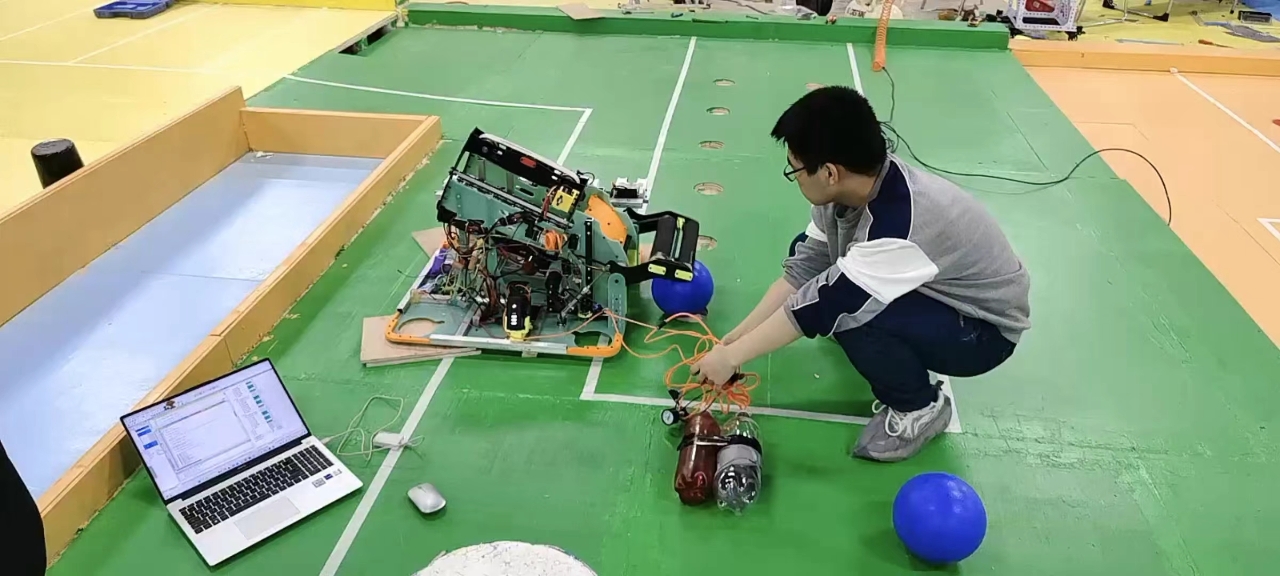
在144平方米的场地上,机器人R1负责模拟插秧和收获,R2在散落的道具球中自动精准识别作为“种子”的球抓取,并且准确运送回仓,赛场上红蓝双方你来我往,进行插秧和运输的对抗。近日,第二十三届全国大学生机器人大赛ROBOCON暨2024亚太大学生机器人大赛国内选拔赛闭幕。我校竞技机器人队在智能学院莫宏伟、工训中心徐立芳等老师的指导下,来自智能学院、水声学院、机电学院等院系的同学通力协作,历经十个月的设计、制作、调试,近二十天的辛苦备战和一周的角逐鏖战,获得国家一等奖。
ROBOCON赛事每年推出一个新主题,此次大赛以“颗粒归仓”为主题,设置“颗粒归仓”“仿生足式”和“机器人排球”三个竞赛项目,吸引来自全国92所院校的133支队伍,2000余名大学生参赛。参赛队需制作两台机器人,一台手动或自动机器人负责插秧与收获,一台全自动机器人负责运输稻谷归仓,双方在赛场上进行秧苗种植与颗粒收获的任务、运输归仓区的对抗,由三分钟内得分高或率先取得“大胜”的队伍获胜。
哈工程竞技机器人队由23名本科生组成,分成结构组、电控组、视觉组、硬件组和运营组五个组别,涉及机械结构设计,智能感知,运动控制,项目管理等多个领域的知识。

在机器人设计时,哈工程竞技机器人队采取了滚筒式的取球方案,相对于常见的夹爪式,这种设计能够大大降低对底盘的控制要求,让机器人在变化的赛场环境之中行动更灵活。
比赛的道具球是一种叫做“拍拍球”的玩具,本身弹性较大,为了降低这种“拍拍球”的回弹对取球的干扰,团队采取云台内管道的差速发射设计方法,让球在管道内进行高速自旋,同时降低球的发射角度,使得球在接触地面的瞬间,球的自旋将发射的速度抵消,达到立刻停球的效果。“我们从平时喜欢玩的球类游戏中获得灵感,经过数次尝试,终于达到了理想效果。”团队成员机电学院本科生马铭泽说。
R2机器人需要在散落的球堆之中寻找到正确的球拾起。在模拟实验时,出现了球相互遮挡、卡在死角、球大量聚集导致出界等情况,这对机器人的路径规划策略和算法识别能力提出巨大挑战。在莫宏伟和徐立芳的指导下,队员们集中对算法进行迭代升级,最终保证了得分动作的高效稳定。
除此之外,哈工程竞技机器人队依据比赛规则和操作手操作习惯,自行研发了遥控手柄,创新使用WIFI点对点通讯,能够在噪声较大的赛场环境下保持通讯的稳定。在结构上,哈工程竞技机器人队自主设计了体积更小、重量更轻的第二代舵轮,同时,它还能够承受大负载,减少发热和噪音,这个全新的舵轮套件得到在场评委和其他参赛队伍的好评。
“从赛题公布到决赛打响历时十个多月,为了完成这个学科交叉问题,我们经常调试到深夜,忙的时候,经常只睡两三个小时,但是却没有人放弃。”团队成员、智能学院本科生李昊说。长时间的磨合,让队员们产生了良好的默契,大家的科技创新意识和动手实践能力也得到了提升。
除了主赛道,在仿生足式越野赛中,学校竞技机器人队凭借稳定的机器人性能和出色的越障能力,最终获得了越野赛国家一等奖(全国第四名)的优异成绩。在仿生足式竞速赛和障碍赛中,分别荣获了国家二等奖和国家三等奖。
全国大学生机器人大赛ROBOCON赛事始于2002年,每年举办一次,至今已经举办23届。大赛目前已成为国内技术挑战性最强、影响力最大的大学生机器人赛事。



我要评论 (网友评论仅供其表达个人看法,并不表明本站同意其观点或证实其描述)
全部评论 ( 条)